はじめに
「統計科学のフロンティア 4 階層ベイズモデルとその周辺―時系列・画像・認知への応用―」の「 第II部 非線形ダイナミカルシステムの再構成と予測」を読んでいた際に,分析対象の時系列データとして,レスラー(Rössler)系のダイナミカルシステムが出てきたので,そのシミュレーション方法を調べた。
問題設定
本書のテーマは,「非線形の時系列モデルを,階層ベイズモデルの枠組みを使って予測する」というものである。
この非線形時系列モデルの例として,レスラー(Rössler)系のダイナミカルシステムが出てくる。
レスラー(Rössler)系の微分方程式の差分化
数値計算などをしやすくするために,次のように差分化する。
なお,次のステップにおける値を求めるためには,ルンゲ・クッタ(Runge-Kutta)法を用いて数値積分している。
また本書では,具体的なデータの生成方法として以下のようにしている。
- ステップ幅
は
としている。
- サンプリング周期
は
としている。
- サンプリング後の学習データのサンプル数は500点である。
シミュレーションのサンプルコード
上記のレスラー(Rössler)ダイナミカルシステムのサンプルコードは以下のようになる。
- コード
import numpy as np import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D def runge_kutta_4_vector(f, y0, t0, t_end, h): """ 4次のルンゲ・クッタ法でベクトルの微分方程式を解く関数 f: 微分方程式 dy/dt = f(t, y), yはベクトル y0: 初期値ベクトル y(t0) t0: 開始時刻 t_end: 終了時刻 h: 時間ステップ幅 """ n = int((t_end - t0) / h) # ステップ数 t_values = np.linspace(t0, t_end, n) y_values = np.zeros((n, len(y0))) # 各時刻のベクトル値を格納する配列 y = np.array(y0, dtype=np.float64) for i, t in enumerate(t_values): y_values[i] = y k1 = np.array(f(t, y)) k2 = np.array(f(t + h / 2, y + h * k1 / 2)) k3 = np.array(f(t + h / 2, y + h * k2 / 2)) k4 = np.array(f(t + h, y + h * k3)) y += h * (k1 + 2 * k2 + 2 * k3 + k4) / 6 return t_values, y_values # レスラー方程式 def rossler(t, y_, a=0.36, b=0.4, c=4.5): x, y, z = y_ dxdt = -y - z dydt = x + a * y dzdt = b + z * (x - c) return [dxdt, dydt, dzdt] # 初期条件とパラメータ y0 = [1.0, 0.0, 0.0] # 初期値 [x, y, z] N_train = 500 # 学習用データのサンプル数 eta = 70 # サンプリング周期 h = 0.01 # 時間ステップ幅 t0 = 0.0 # 開始時刻 t_end = N_train * eta * h # 終了時刻 # 解を計算 t_values, y_values = runge_kutta_4_vector(lambda t, y_: rossler(t, y_), y0, t0, t_end, h) # サンプリング周期で間引く t_obs = t_values[::eta] y_obs = y_values[::eta]
実装上のポイント
実装上のポイントとして挙げられるのは,runge_kutta_4_vector(f, y0, t0, t_end, h) 関数は,関数fを引数に取る(汎関数になっている)。こうすることで,数値積分したい微分方程式が別のものになってもルンゲ・クッタ法を適用することができるようになっている。
レスラー系の微分方程式 rossler(t, y_, a, b, c) は,時間の変数tと状態量の変数y_を含んでいる。そのため runge_kutta_4_vector 関数の引数にそのまま入れてしまうと「t, y_が定義されていない」というエラーが出るので,ラムダ式を用いて変数t, y_を定義してから代入している。
可視化結果
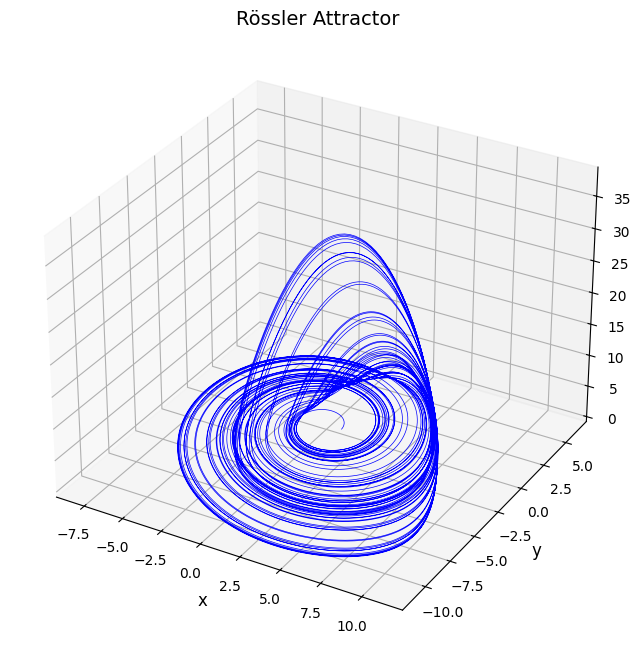
間引きをしない場合の結果を可視化すると,以下のようになった。
- コード
# 間引き無しデータの3次元プロット fig = plt.figure(figsize=(10, 8)) ax = fig.add_subplot(111, projection='3d') ax.plot(y_values[:, 0], y_values[:, 1], y_values[:, 2], lw=0.5, color='b') ax.set_title("Rössler Attractor", fontsize=14) ax.set_xlabel("x", fontsize=12) ax.set_ylabel("y", fontsize=12) ax.set_zlabel("z", fontsize=12) plt.show()
- 出力
まとめと感想
Pythonを用いる際に,「関数を引数にする関数」を用いることで,手軽にルンゲ・クッタ法を実装できた。
ルンゲ・クッタ法は数値シミュレーションでたまに出てくるので,今回のコード例を別のところでも横展開できるようにしていきたい。
本記事を最後まで読んでくださり,どうもありがとうございました。